Jak skuteczniej chłodzić pracujące w mozole roboty? Tak jak robią to ssaki, które się pocą. Naukowcy z Uniwersytetu Cornella stworzyli miękkie „mięśnie” robota, które mogą regulować jego temperaturę poprzez perspirację
Inspiracja naturą w projektowaniu maszyn na Uniwersytecie Cornella znów idzie krok dalej. Nie tak dawno naukowcy pod kierownictwem prof. Roba Shepherda opracowali tam roboty, wypełnione elektrolitem niosącym energię do ich pracy, tak jak ludzki organizm zasilany jest tlenem i składnikami odżywczymi krwi. Teraz nauczyli roboty pocić się, by mogły wydajniej i dłużej pracować.
Zarządzanie temperaturą pracujących robotów umożliwia ich funkcjonowanie przez dłuższy czas bez przegrzania. A to ważny problem szczególnie w przypadku miękkich robotów wykonanych z materiałów syntetycznych, które utrzymują ciepło zamiast je rozpraszać, jak metale. Temperatura modyfikuje też strukturę materiału zmieniając jego właściwości.
Rob Shepherd, profesor inżynierii mechanicznej i lotniczej w Cornellu, zajmuje się m.in. opracowaniem miękkich siłowników, które naśladują funkcje motoryczne i biologiczne żywych organizmów. Szczególnie interesuje się jednoczesnym zwiększeniem prędkości, optymalizacją wymiarów, rozdzielczości i właściwości materiałów na etapie technik ich wytwarzania. Kierując nowym projektem, zainspirował się wyjątkowym zjawiskiem fizjologicznym, znanym człowiekowi i wielu ssakom – poceniem się.
Badacze z Uniwersytetu Cornella nauczyli roboty pocić się, by mogły wydajniej i dłużej pracować
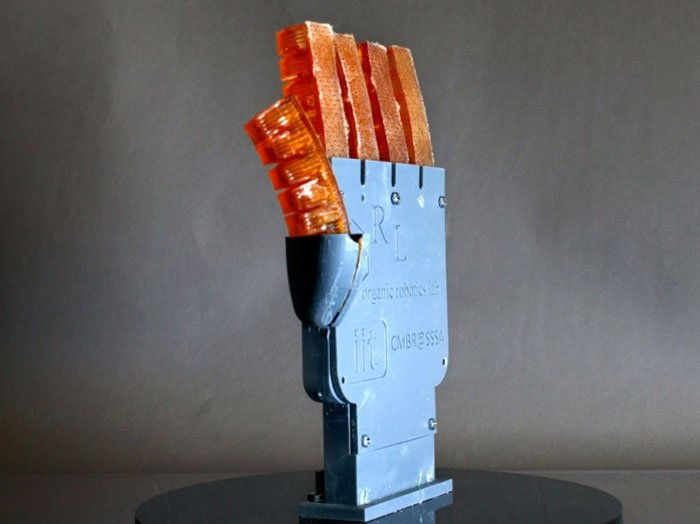
Do współpracy Shepherd zaprosił laboratorium profesora inżynierii Cornella, Emmanuela Giannelisa. Tam stworzono materiały nanopolimerowe, przystosowane do przewodzenia i wydalania wody. Wydrukowano je w 3D techniką stereolitografii wielomateriałowej. Ta metoda wykorzystuje światło do utwardzania żywicy w formę wcześniej zaprojektowanych kształtów. Powstały siłowniki podobne do palców, złożone z dwóch materiałów hydrożelowych, które mogą zatrzymywać wodę i reagować na temperaturę – coś na kształt „inteligentnych” gąbek.
Warstwa podstawowa, wewnętrzna kurczy się w temperaturze powyżej 30 stopni Celsjusza, wyciskając wodę na powierzchnię przez mikroskopijne „pory”. Te zamykają się, gdy robi się chłodniej. W badaniach wykazano, że odparowanie wody obniża temperaturę powierzchni siłownika nawet o 21 stopni Celsjusza w ciągu 30 sekund, a proces chłodzenia jest około trzy razy bardziej wydajny niż u ludzi.
Wadą tej technologii jest to, że może ona utrudniać mobilność robota. Potrzebne jest również uzupełnianie wody w maszynie. To skłania prof. Shepherda do myślenia nad tym, czy w przyszłości roboty nie tylko będą wylewać pot przy ciężkiej robocie, ale będą również pić, żeby uzupełniać ubytek płynów.
Badacze w opracowaniu naukowym zasugerowali, że zdolność robota do wydzielania płynów może również prowadzić do opracowania metod wchłaniania składników odżywczych, katalizowania reakcji, usuwania zanieczyszczeń i pokrywania powierzchni robota warstwą ochronną.